
KUKA youBot Manipulation
Introduction
This project contains Python 3 scripts that plans a trajectory for the end-effector of the youBot mobile manipulator, performs odometry as the chassis moves, and performs feedback control to drive the youBot to pick up a block at a specified position and deliver it to the desired location in the CoppeliaSim simulation. The source codes can be found in the following link:
https://github.com/rubberdk/KUKA-youbot-Manipulation
RESULTS
CODES
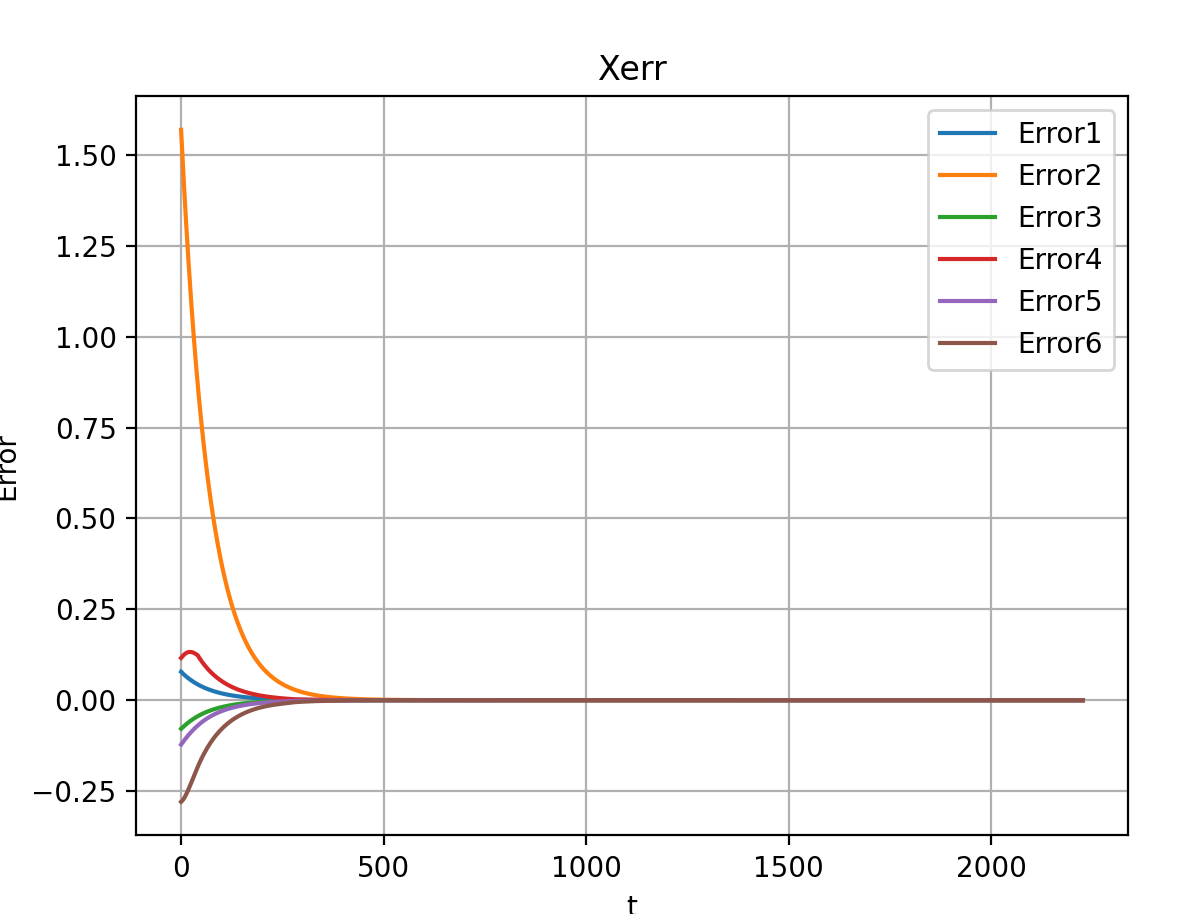
There are a total 4 Python scripts which are milestone1:NextState, milestone2:TrajectoryGenerator, milestone3:FeedforwardControl, and Run. Three milestones define functions that manipulate the configuration of the robot, and the Run script combines those three functions, plot Xerr, and generates a csv file that can be used in the CoppeliaSim simulation.
Milestone 1: NextState
The main function in the simulator, called NextState takes
Inputs:
● 12-vector representing the current configuration of the robot
● 9-vector of controls indicating the arm joint speeds
● timestep Δt
● positive real value indicating the maximum angular speed of the arm joints and the wheels.
Outputs:
● new arm joint angles = (old arm joint angles) + (joint speeds) * Δt
● new wheel angles = (old wheel angles) + (wheel speeds) * Δt
● new chassis configuration is obtained from odometry
Milestone 2: TrajectoryGenerator
TrajectoryGenerator generates the reference trajectory for the end-effector frame {e}. It takes
Inputs: ● The initial configuration of the end-effector in the reference trajectory: T se , initial .
● The cube’s initial configuration: T sc ,initial .
● The cube’s desired final configuration: T sc ,final .
● The end-effector’s configuration relative to the cube when it is grasping the cube: T ce ,grasp .
● The end-effector’s standoff configuration above the cube, before and after grasping, relative to the cube
● The number of trajectory reference configurations per dt seconds
Output:
● A representation of the N configurations of the end-effector along the entire concatenated eight-segment reference trajectory.
Milestone 3: FeedbackControl
This function calculates the kinematic task-space feedforward plus feedback control law taking
Inputs:
● The current actual end-effector configuration X (also written Tse).
● he current end-effector reference configuration Xd (i.e., Tse,d).
● The end-effector reference configuration at the next time step in the reference trajectory, Xd,next
● The PI gain matrices Kp and Ki.
● The timestep Δt between reference trajectory configurations.
Output:
● The commanded end-effector twist expressed in the end-effector frame {e}.
Run
This script combines three functions above and executes a function called run
which plots Xerr and generates a csv file for the CoppeliaSim animation and log file.