
Baxter-Builds-Towers
Project Overview
This is a ROS project developed as part of ME495 - Embedded Systems in Robotics course at Northwestern University.
The goal of this project is to use the BAXTER robot and build a “HUGE” tower from plastic cups
You can find the Github repository at the following link:
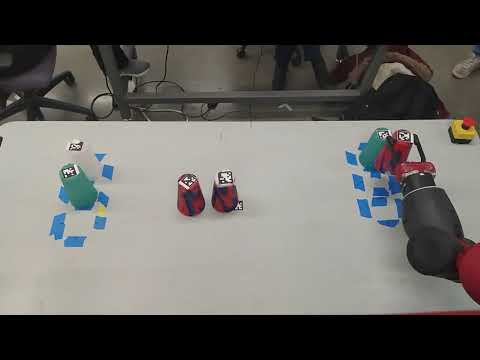
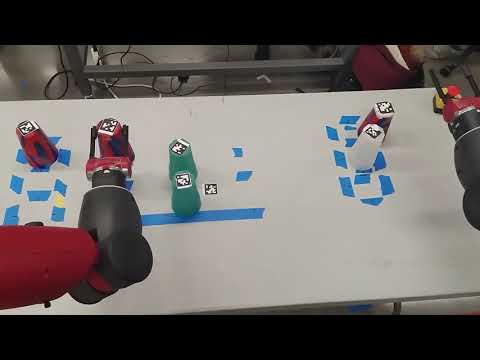
My role in this project was image processing using apriltags. I implemeted apriltag detection using apriltag_ros wrapper package and published cups’ transformation so that the Baxter would detect and keep track of the locations of the cups.
Demonstration
10 Cups Tower

6 Cups Tower
6 Cups sorting
Project Details
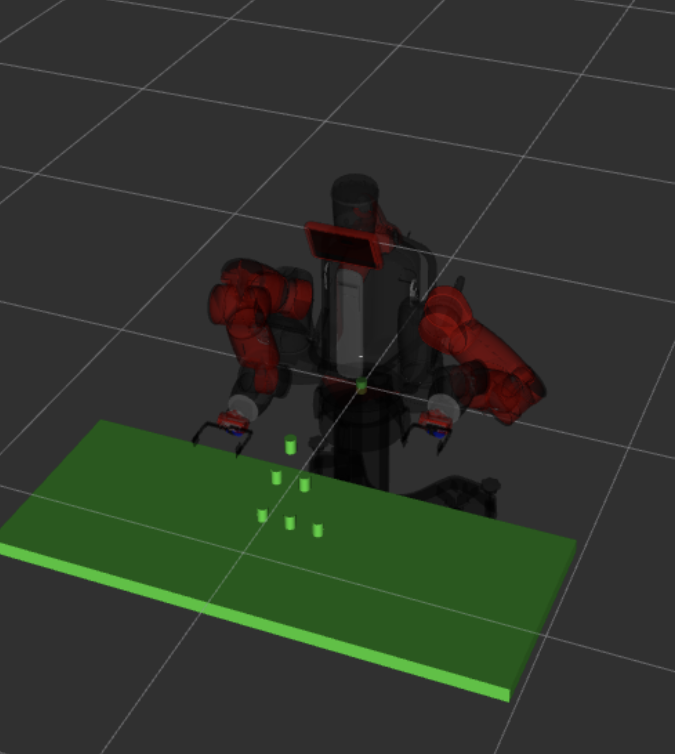
Gazebo Simulation

- Baxter Simulator
- Tool utilized to test code without real robot
- Get the position of the cups with get_model_state service
- Set cup pose with set_model_state
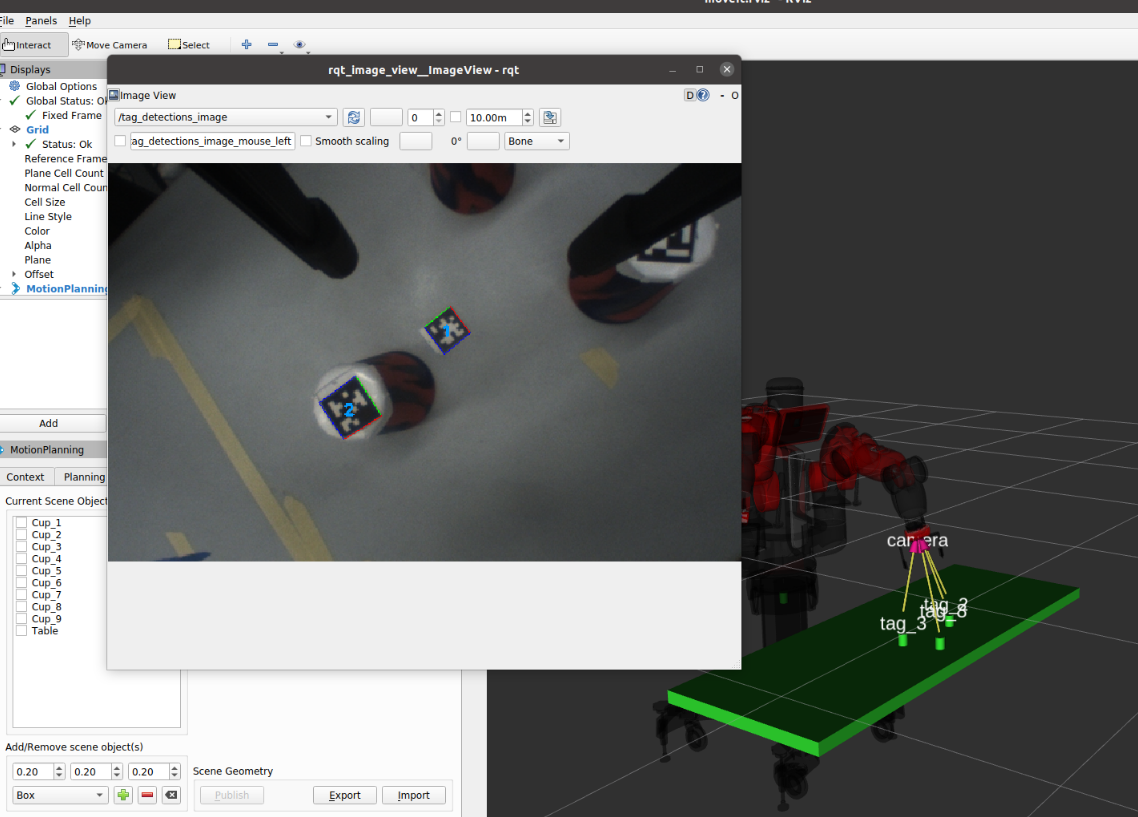
Rviz
- Moveit to set the planning Scene and Rviz visualizer
- To set the positions of the cups and tables
- To add the objects to the scene
- To return information about the scene
Robot Control
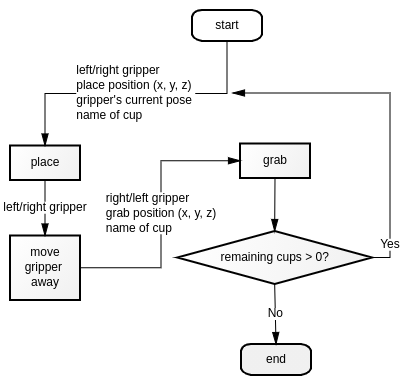
Let one hand first place what it’s grabbing, then let the other hand grab the next cup to place.
Computer Vision
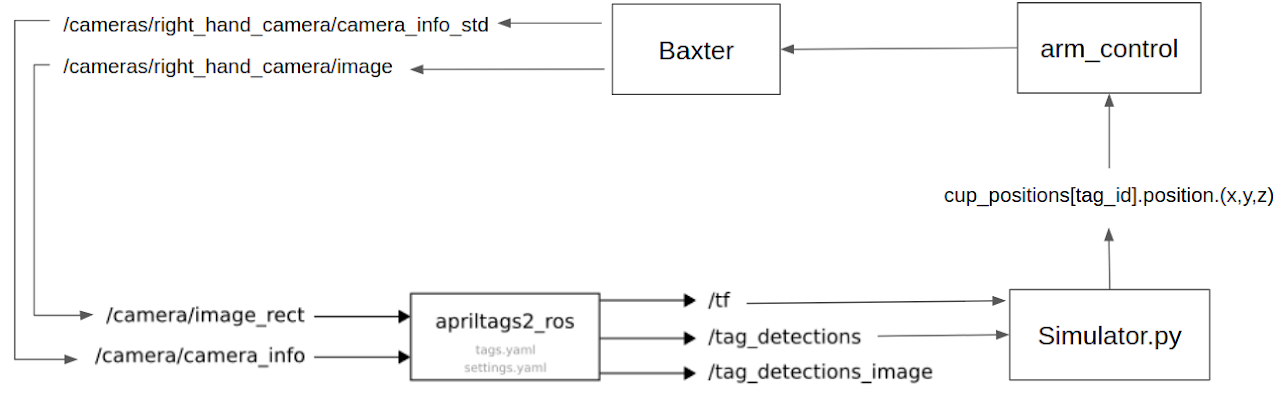
- We used a aprtiltag_ros which is a ROS wrapper of the AprilTag to get x,y,z positions of the cups.
- We mainly used the Baxter’s right hand camera for tag deteection,but we gave options to use left camera or the head camera.
- Then simulator.py which is a MoveIt Python API coverts tf data to x,y,z positions and add positions and visual cylinders that represent cups to the scene that can be seen in Rviz
- Arm_control nodes use those positions for Baxter’s task for sorting or building cups
Project Team Members
Dimitrios Chamzas
Dong Ho Kang
Yuxiao Lai
Gabrielle Wink