Design of a Person-Carrying Robot for Contact Compliant Navigation
Carlos Gonzalez, Samantha Lee, Francisco Montano, and 5 more authors
Aug 2023
Navigating human-centered environments is a complex task for robots. It requires having hardware capable of sensing the environment as humans do and requires software that efficiently reasons about this information in real time. Current robotic platforms tend to avoid contacts, while human robot interaction highly depends on this. We believe having platforms and algorithms that combine visual and tactile information is crucial in developing navigation algorithms for human-centered environments. In this work, we present the mechatronic design of our new mobile robot which is capable of carrying a person and that can sense its environment through contact and vision. We detail our design procedure, parting from design specifications to material selection and show its preliminary appearance along with some experimental navigation while carrying a person. We provide detailed analyses on our mechanical design through Finite Element Analysis simulations, present our material seleection for all of the hardware components, and give details on our low-level code controlling our robot. We have set up our robot to work with the ROS framework and have shared our code, which includes the low-level code to communicate with the EtherCAT servo drives. We believe this information will ease development of new robots by the robotics research community.
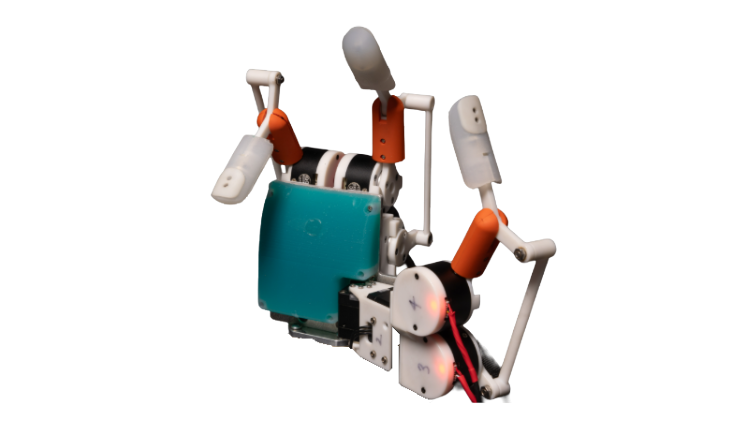 PLATO Hand: Shaping Contact Behavior with Fingernails for Precise ManipulationarXiv preprint arXiv:2602.05156, 2026
PLATO Hand: Shaping Contact Behavior with Fingernails for Precise ManipulationarXiv preprint arXiv:2602.05156, 2026

